Moment of inertia (AQA A-Level Physics): Revision Notes
Moment of inertia
Introduction to torque in rotational motion
When a force acts on a rigid body but does not pass through its centre of mass, it creates a turning effect. This causes the body to rotate about a fixed axis.
Torque (symbol ) is the product of a force and the perpendicular distance from the line of action of the force to the axis of rotation. If a force acts at a perpendicular distance from an axis, the torque is calculated as:
The unit of torque is the newton metre (N m). By convention, torques that produce clockwise rotation are considered positive.
Understanding torque is essential because it is the rotational equivalent of force in linear motion. Just as a force causes linear acceleration, a torque causes angular acceleration about an axis.
Deriving the rotational form of Newton's second law
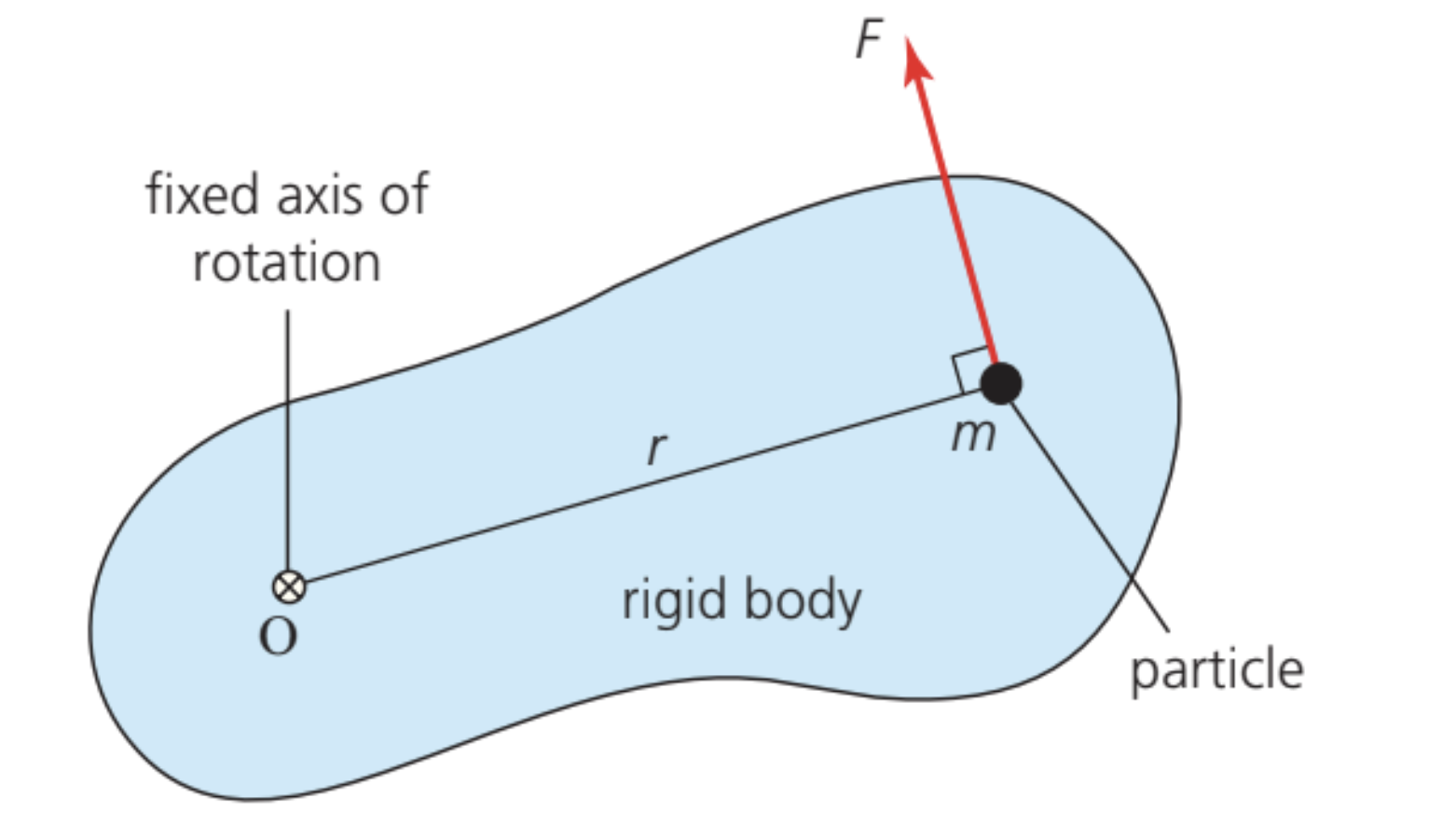
To understand moment of inertia, we need to examine how torque affects a single particle within a rotating rigid body.
Consider a particle of mass located at distance from the axis of rotation. When a force acts on this particle, it produces a linear acceleration according to Newton's second law:
For rotational motion, linear acceleration is related to angular acceleration by:
Substituting this relationship into Newton's second law:
The torque acting on this particle is the force multiplied by the perpendicular distance from the axis:
Substituting our expression for :
This equation represents the rotational version of Newton's second law. Notice how the structure parallels the linear version:
Parallel Between Linear and Rotational Motion:
- Linear motion:
- Rotational motion:
In this rotational form, force is replaced by torque, linear acceleration by angular acceleration, and mass is replaced by . This replacement is important because in rotational motion, not only the mass matters, but also how far that mass is from the axis of rotation.
Definition and meaning of moment of inertia
The term inertia describes an object's resistance to changes in its state of motion. In linear motion, mass determines this resistance: when a force is applied, the resulting acceleration depends on mass through .
Similarly, when an object is forced to rotate, it resists this change in rotational motion. The moment of inertia (symbol ) quantifies this resistance to rotational acceleration about a particular axis.
For a single particle of mass at distance from an axis of rotation:
The unit of moment of inertia is kg m².
The moment of inertia depends on both the mass and how far that mass is distributed from the axis of rotation. Objects with mass concentrated further from the axis have larger moments of inertia and are therefore more difficult to set spinning or to stop once rotating.
An object's moment of inertia is always defined for a specific axis of rotation. If the axis changes, the moment of inertia will also change because the mass distribution relative to the new axis is different.
Moment of inertia for extended rigid bodies
Real objects consist of many particles, each at different distances from the axis of rotation. To find the total moment of inertia, we must consider all these particles together.
For a rigid body composed of many point masses, we sum the individual moments of inertia. If particle has mass and is at distance from the axis, the total moment of inertia is:
where the summation symbol indicates we add up the contributions from all particles throughout the body. Each term represents the contribution of one particle to the total moment of inertia.
This summation approach emphasizes that moment of inertia depends on how mass is distributed throughout the object. Two objects with the same total mass can have very different moments of inertia if their mass distributions differ.
Example of Mass Distribution Effects:
A hollow cylinder has more mass further from its axis than a solid cylinder of the same mass and radius, giving it a larger moment of inertia.
The precise location of the axis of rotation significantly affects the moment of inertia value. Moving the axis changes the distance of each mass element from that axis, thereby changing the entire summation.
Standard formulas for regular shapes
For objects with regular geometric shapes, the summation can be performed using calculus to derive standard formulas. Here are the moments of inertia for some common three-dimensional objects, where is the total mass and is the relevant dimension:
Standard Moment of Inertia Formulas:
Hoop (thin ring) about its central axis:
For a hoop, all the mass is at the same distance from the central axis, making this the simplest case.
Solid cylinder or disc about its central axis:
A solid cylinder has mass distributed from the centre out to radius , resulting in a moment of inertia that is half that of a hoop with the same mass and radius.
Solid sphere about any diameter:
A sphere has its mass distributed in three dimensions, with much of the mass closer to the centre than the outer radius, giving it an even smaller moment of inertia than a disc.
These formulas are derived for specific axes of rotation. Using a different axis for the same object would require a different calculation and would yield a different moment of inertia.
Combining moments of inertia for composite systems
When two or more objects rotate about a common axis of rotation, their individual moments of inertia simply add together to give the total moment of inertia for the system.
For example, consider two flywheels A and B with radii and and masses and respectively. If both are discs rotating about their common central axis:
This additive property applies to any combination of rotating objects, provided they all rotate about the same axis. This principle is useful when analyzing complex rotating systems composed of multiple components.
Application: flywheels and energy storage
A flywheel is a mechanical device consisting of a disc or wheel designed to rotate rapidly. As it spins, a flywheel stores rotational kinetic energy, which can be released when needed.
The amount of energy stored depends on the moment of inertia: objects with larger moments of inertia store more rotational kinetic energy when rotating at the same angular velocity. This is analogous to how objects with greater mass store more translational kinetic energy when moving at the same linear velocity.
Comparing different shapes rotating at the same angular velocity, a hoop () stores more energy than a disc () of the same mass and radius. This is because the hoop has a larger moment of inertia due to all its mass being concentrated at the outer radius.
Worked example: calculating moment of inertia for a hoop
Worked Example: Calculating Moment of Inertia for a Hoop
Problem: A hoop has a diameter of 70 cm and a mass of 300 g. Calculate the moment of inertia about its central axis.
Solution:
First, identify the appropriate formula. For a hoop about its central axis:
Convert the given values to SI units:
- Mass:
- Diameter , so radius:
Substitute into the formula:
I &=& mr^2 \\ I &=& 0.3 \times (0.35)^2 \\ I &=& 0.3 \times 0.1225 \\ I &=& 0.037 \text{ kg m}^2 \end{array}$$ **Answer:** $I = 0.037 \text{ kg m}^2$ (or $0.04 \text{ kg m}^2$ to 2 significant figures) This calculation demonstrates how the moment of inertia depends on both the mass and the :highlight[square of the radius]. Doubling the radius would quadruple the moment of inertia, while doubling the mass would only double it.Remember!
Key Points to Remember:
-
Torque is the rotational equivalent of force: , where is the perpendicular distance from the axis to the line of action of the force.
-
Moment of inertia () measures an object's resistance to rotational acceleration about a specific axis. For a single particle: , with units of kg m².
-
For extended objects, moment of inertia is the sum of all particle contributions: , and depends critically on the choice of axis.
-
Standard formulas: hoop , solid disc , solid sphere . Objects with mass further from the axis have larger moments of inertia.
-
Moments of inertia for objects sharing a common axis of rotation add together: