Springs (VCE SSCE Physics): Revision Notes
Springs
Introduction
When objects are bent, stretched, twisted, or compressed, work must be done on them. If the object returns to its original shape once the external force is removed, it stores energy during deformation. This stored energy is called elastic potential energy. Springs are excellent examples of objects that store elastic potential energy when compressed or stretched.
Real-world application: Nike developed running shoes with Pebax midsoles that return up to 87% of a runner's energy, compared to traditional materials that return only 65%. Combined with carbon-fibre plates, these shoes can improve running performance by up to 4%, demonstrating the practical importance of understanding elastic energy storage.

Hooke's law
Understanding spring behaviour
When you apply force to stretch or compress a spring, the amount of force needed depends on the spring's stiffness. Different springs require different forces to achieve the same extension. When we plot the applied force against the extension for various springs, we get straight-line graphs passing through the origin.
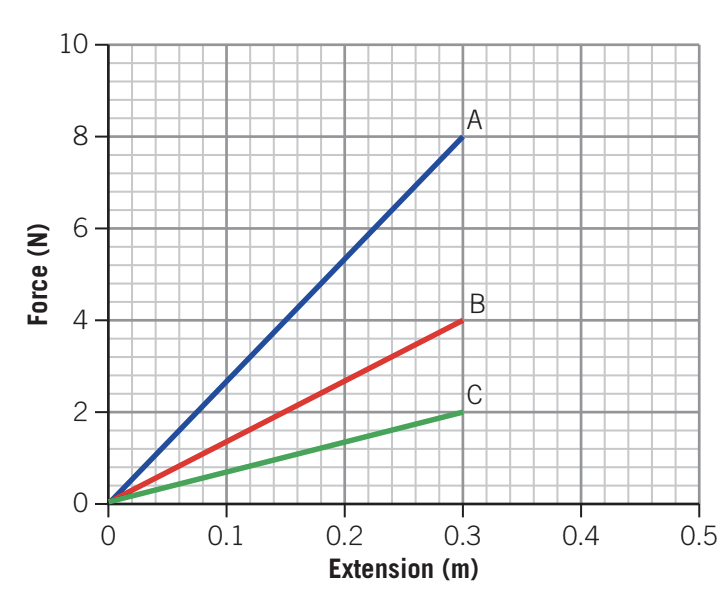
The graph shows three different springs (A, B, and C) and their force-extension relationships. Notice that:
- All lines pass through the origin (zero force means zero extension)
- The lines have different gradients (steepness)
- Steeper gradients indicate stiffer springs
The spring constant
The gradient of a force-extension graph represents the spring's stiffness, called the spring constant (). This value tells us how much force is needed to stretch or compress the spring by one metre.
To calculate the gradient:
The unit is newtons per metre ().
A stiffer spring has a larger spring constant and a steeper gradient. For example, if spring A in the graph requires 8 N to extend by 0.3 m:
Hooke's law formula
Robert Hooke discovered the linear relationship between force and extension for ideal springs. Hooke's law states:
Where:
- = force applied to the spring (N)
- = spring constant ()
- = compression or extension of the spring (m)
The negative sign indicates that the spring's restoring force acts in the opposite direction to the compression or extension. In most calculations, we can work with the magnitude and simply remember that the spring force opposes the deformation.
Worked Example: Car Suspension Spring
A car suspension spring experiences a force of N. If the spring constant is , calculate the compression.
Solution: Using Hooke's law: , we can rearrange for extension:
The spring compresses by 0.171 m (or 17.1 cm).
Elastic potential energy
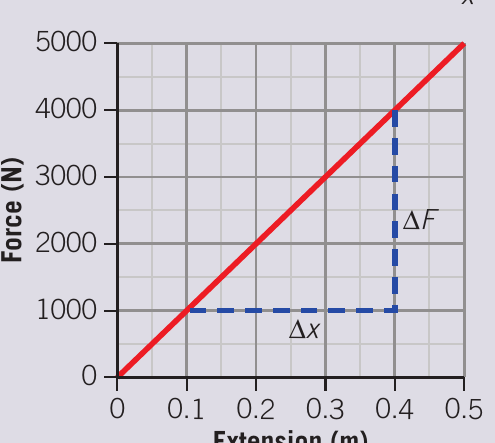
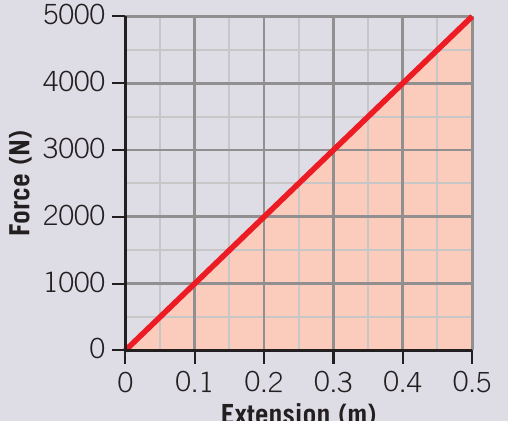
Area under the force-extension graph
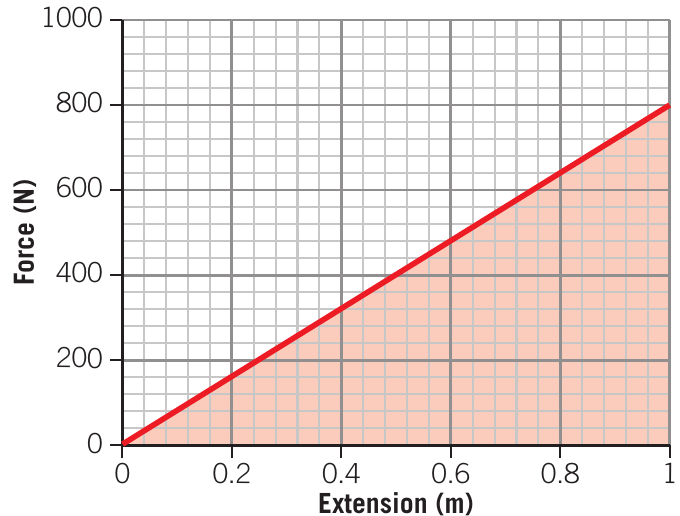
The work done on a spring equals the area under the force-extension graph. Since force varies linearly with extension for an ideal spring, this area forms a triangle.
Worked Example: Calculating Elastic Potential Energy
For a spring with spring constant 800 stretched to 1.00 m:
Solution: The area under the graph (triangle area):
Deriving the elastic potential energy formula
The area under the force-extension graph equals half the base multiplied by the height:
Since (from Hooke's law), we can substitute:
This gives us the formula for elastic potential energy:
Where:
- = elastic potential energy (J)
- = spring constant ()
- = compression or extension of the spring (m)
Elastic potential energy, spring potential energy, and strain potential energy are interchangeable terms.
Why more energy is needed at greater extensions
According to Hooke's law, the more a spring is extended or compressed, the greater the restoring force becomes. This means progressively more energy is required to extend a spring by the same amount as the extension increases.
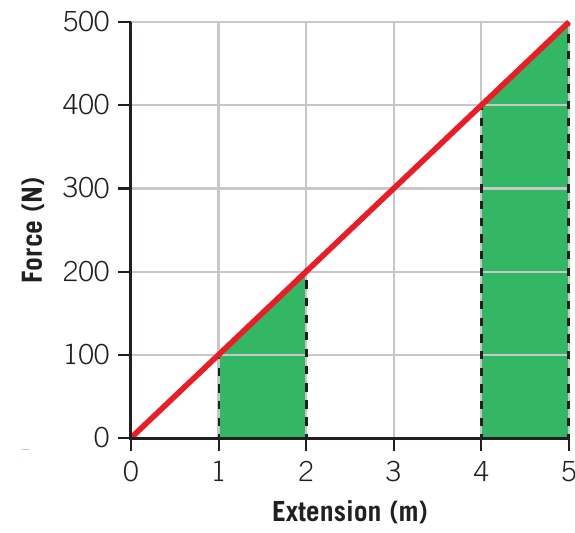
The graph illustrates that extending a spring from 1 m to 2 m requires much less energy than extending it from 4 m to 5 m. The energy required is shown by the shaded areas under the graph.
This relationship is also evident in the formula , where elastic potential energy is proportional to extension squared. A small increase in extension produces a much larger increase in stored energy.
Change in elastic potential energy
When calculating the change in elastic potential energy, we can either find the area under the relevant section of the graph or use the formula:
Where:
- = final extension (m)
- = initial extension (m)
Worked Example: Change in Elastic Potential Energy
To stretch a spring with from 10 cm to 14 cm, calculate the energy required.
Solution: First, convert to metres: m, m
The energy required is 0.72 J.
Horizontal spring systems
Energy transformations in horizontal springs
Consider a spring attached to a wall at one end with a mass attached to the other end, resting on a frictionless surface. When the spring oscillates, elastic potential energy and kinetic energy constantly transform into each other.
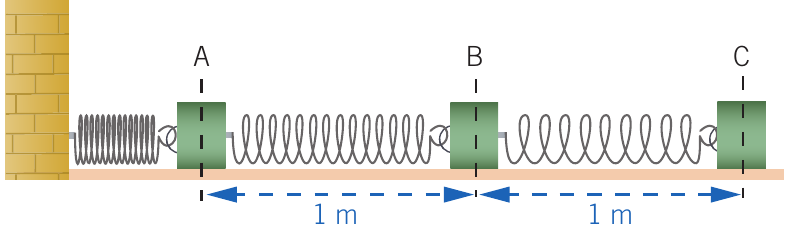
The spring oscillates between three key positions:
- Point A: Maximum compression
- Point B: Equilibrium position (natural length)
- Point C: Maximum extension
The equilibrium position
The equilibrium position is the point where the net force on the oscillating mass is zero. For a horizontal spring, this occurs when the spring is at its natural length (neither compressed nor extended).
Energy changes during oscillation
The total energy remains constant throughout the oscillation (assuming no friction):
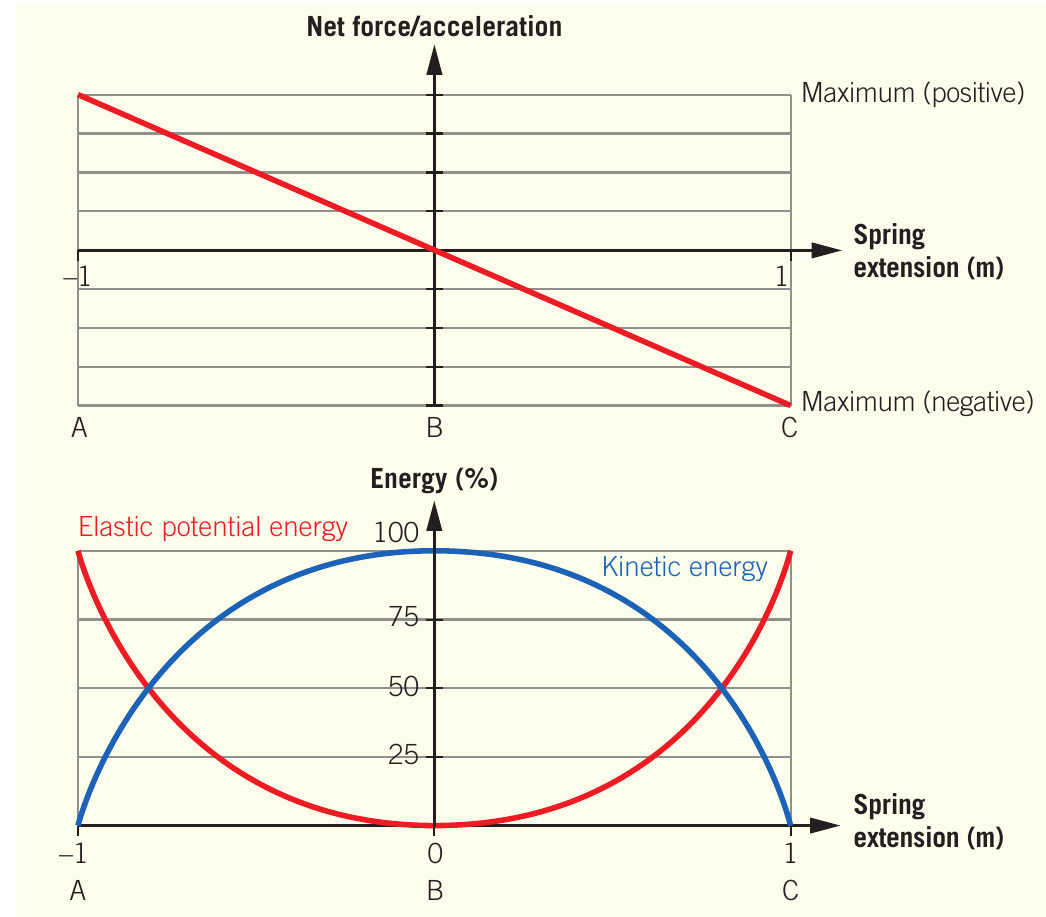
At point A (maximum compression):
- Elastic potential energy: 100% of total energy
- Kinetic energy: 0% (momentarily stationary)
- Net force and acceleration: Maximum (directed towards B)
At point B (equilibrium position):
- Elastic potential energy: 0% (no compression or extension)
- Kinetic energy: 100% of total energy (maximum velocity)
- Net force and acceleration: Zero
At point C (maximum extension):
- Elastic potential energy: 100% of total energy
- Kinetic energy: 0% (momentarily stationary)
- Net force and acceleration: Maximum (directed towards B, opposite to point A)
The mass then returns to point B and continues to point A, repeating the cycle. Energy continuously converts between elastic potential energy and kinetic energy, with maximum velocity occurring at the equilibrium position.
Vertical spring systems
Energy transformations in vertical springs
In a vertical spring system, three forms of energy transform into each other: gravitational potential energy, elastic potential energy, and kinetic energy.
The energy conservation equation for vertical springs is:
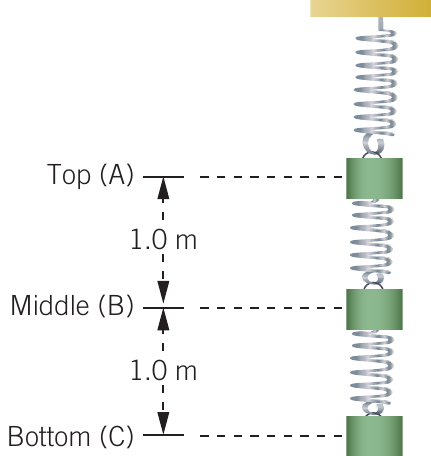
Typical vertical spring setup
A common example involves a mass hanging from a spring attached to a fixed support. When released from rest, the system oscillates between a top position (A), middle position (B), and bottom position (C).
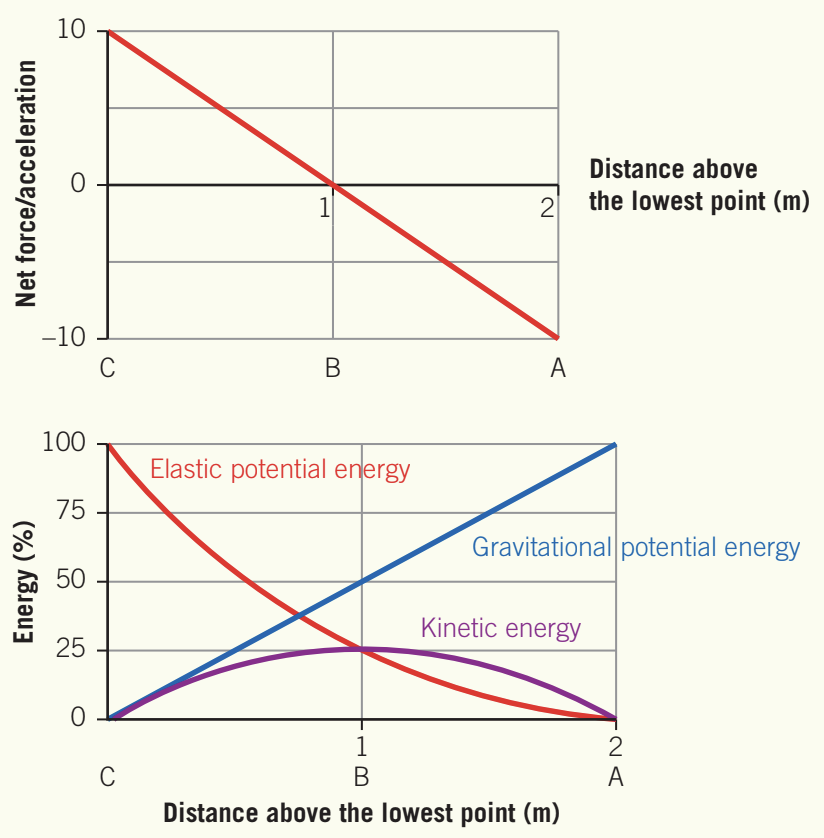
At point A (top position):
- Spring: Unstretched (zero elastic potential energy)
- Gravitational potential energy: Maximum (if we take point C as zero)
- Kinetic energy: Zero (momentarily stationary)
- Acceleration: downwards (due to gravity only)
At point B (equilibrium position):
- Spring force balances gravitational force ()
- Kinetic energy: Maximum (approximately 25% of total energy)
- Gravitational potential energy: Half of maximum
- Elastic potential energy: Increasing from zero
At point C (bottom position):
- Elastic potential energy: Maximum (100% of total energy)
- Gravitational potential energy: Zero (by definition)
- Kinetic energy: Zero (momentarily stationary)
- Acceleration: upwards (net force from spring exceeds weight)
The mass then accelerates upwards, passes through point B, decelerates, and becomes momentarily stationary at point A before the cycle repeats.
Key insight about total energy
At any position in a vertical spring system, the sum of gravitational potential energy, elastic potential energy, and kinetic energy equals the total energy of the system (100%). Energy is conserved throughout the oscillation.
Worked example: Vertical spring system
Worked Example: Vertical Spring Oscillation
A spring with a 1.25 kg mass oscillates freely with maximum extension of 18.0 cm.
Part (a): Draw forces when spring is unextended.
Solution: Only the gravitational force acts downwards:
Part (b): Calculate the spring constant.
Solution: Taking the bottom as zero gravitational potential energy, at maximum extension all energy is elastic:
Since the change in height equals the extension:
Substituting values:
The spring constant is 136.1 N·m⁻¹.
Part (c): Calculate maximum velocity.
Solution: Maximum velocity occurs when spring force equals gravitational force:
Using energy conservation:
The maximum velocity is 0.939 m·s⁻¹.
Understanding force-extension graphs
Reading gradients
The gradient (steepness) of a force-extension graph represents the spring constant. To calculate it:
The unit is always the y-axis unit divided by the x-axis unit. For force-extension graphs:
This confirms the gradient equals the spring constant:
Calculating area under graphs
The area under a force-extension graph represents the work done on the spring, which equals the stored elastic potential energy.
For a triangular area:
The unit is found by multiplying the axis units:
This confirms that area under the graph equals elastic potential energy, measured in joules.
Experimental graphs
When plotting elastic potential energy against extension squared (), we get a straight line through the origin.
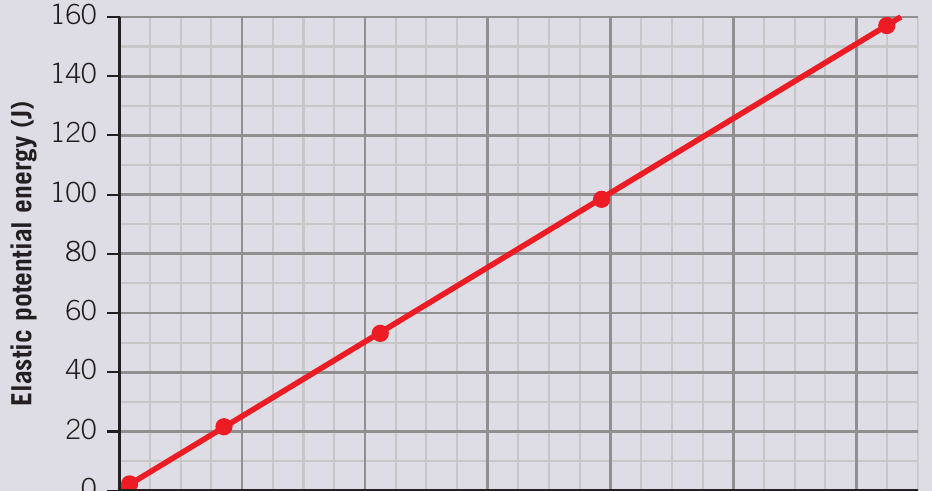
The gradient of this graph is:
Since , we can rearrange to find:
This method allows experimental determination of spring constants by plotting energy data. The spring constant is simply twice the gradient of the vs graph.
Real-world applications
Springs are fundamental components in many everyday applications that demonstrate the principles of elastic potential energy:

- Vehicle suspension systems: Springs absorb energy from bumps, providing smooth rides and protecting passengers
- Bungee jumping: Elastic cords store gravitational potential energy safely, converting it gradually to prevent injury
- Athletic shoes: Elastic materials in soles return energy to improve performance, as seen in modern running shoes
- Trampolines: Springs convert gravitational potential energy to kinetic energy, allowing repeated bouncing
- Mechanical watches: Springs store energy to power mechanisms over extended periods
Understanding spring behaviour allows engineers to design safer, more efficient systems across numerous applications. From vehicle safety to athletic performance, the principles of elastic potential energy are essential in modern engineering.
Remember!
Key Points to Remember:
- Hooke's law states that force is proportional to extension:
- The spring constant () represents spring stiffness and equals the gradient of the force-extension graph
- Elastic potential energy is given by and equals the area under the force-extension graph
- In horizontal spring systems, energy oscillates between elastic potential energy and kinetic energy, with maximum kinetic energy at the equilibrium position
- In vertical spring systems, gravitational potential energy, elastic potential energy, and kinetic energy all transform into each other while total energy remains constant
- Energy is always conserved in ideal spring systems (no friction or air resistance)
- The equilibrium position is where the net force is zero: at natural length for horizontal springs, where for vertical springs