Motion on a Plane (HSC SSCE Physics): Revision Notes
Relative Motion in a Plane
What is relative motion?
When we observe an object moving, how fast it appears to be going and in what direction depends on our own position and motion. This is the essence of relative motion. The same object can have different velocities depending on who is watching it.
A frame of reference is the viewpoint or perspective from which we observe and measure motion. Different observers in different frames of reference will see different velocities for the same object.
Understanding Frames of Reference Through an Example
Imagine you are sitting on a train. A passenger walking down the aisle appears to be moving slowly to you. But to someone standing on the platform outside, that passenger is moving much faster because they are also being carried along by the train's motion. The passenger has different velocities in different frames of reference.
Understanding relative position
Before we look at relative motion, let's understand relative position. Where an object appears to be located depends on where the observer is standing.
If object 1 is at position and an observer (object 2) is at position , then the position of object 1 relative to object 2 is:
This formula tells us the displacement from object 2 to object 1. In other words, it's the displacement you would need to apply to reach object 1 if you started at object 2.
Simple example: If a dog is from a wall and a cat is from the wall in the same direction, then the dog is from the cat. The negative sign indicates that the dog is on the opposite side (towards the wall) from the positive direction.
Relative velocity in one dimension
Just as position is relative, velocity is also relative. An object's velocity depends on what we measure it against.
For objects moving along a straight line (one dimension), the velocity of object 1 relative to object 2 is:
where is the velocity of object 1 relative to the ground, and is the velocity of object 2 relative to the ground.
Let's look at a practical example:
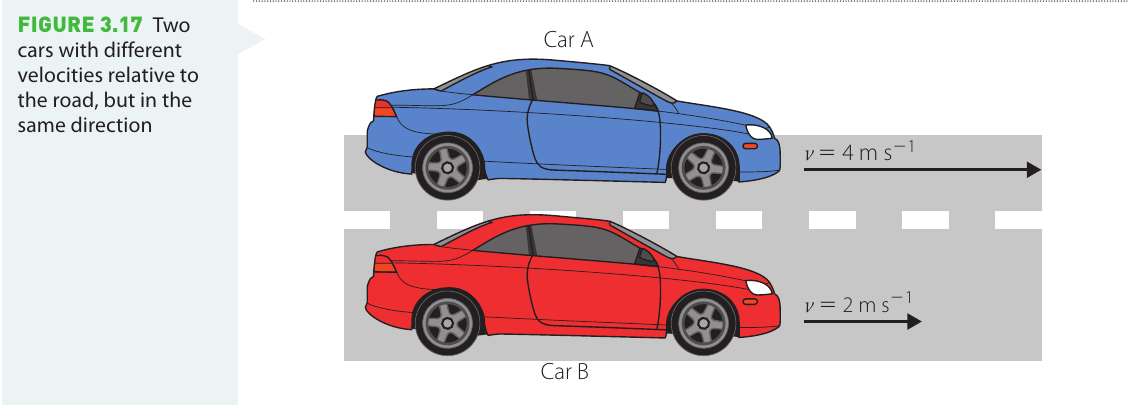
In the figure above, Car A is travelling at and Car B is travelling at , both in the same direction. Car A is moving faster than Car B.
Different Perspectives on the Same Motion
From different frames of reference, this situation looks different:
- An observer standing still on the roadside sees both cars moving to the right
- An observer in Car B sees Car A moving to the right at and themselves as stationary
- An observer in Car A sees Car B moving backwards (to the left) at and themselves as stationary
Relative velocity as vectors
In the more general case, when velocities are not parallel, we must use vector subtraction:
where the velocities are now vectors. The vectors could be parallel, perpendicular, or at any angle in between.
Fundamental Equation for Relative Motion
This equation is fundamental to solving relative motion problems in two dimensions. To subtract vectors, we add the negative of the second vector:
Remember: subtract to find relative - always subtract velocities to find relative velocity.
Worked example: motorbikes with perpendicular velocities
Let's solve a problem where two objects are moving perpendicular to each other.
Worked Example: Perpendicular Velocities
Problem: Aditya (A) and Belinda (B) are riding motorbikes. Aditya is riding north at . Belinda is riding east at . What is Aditya's velocity relative to Belinda? Take north as positive and east as positive .
Given information:
- north
- east
Step 1: Identify the appropriate vector equation.
Step 2: Subtract by adding the negative vector.
Step 3: Draw a vector diagram.
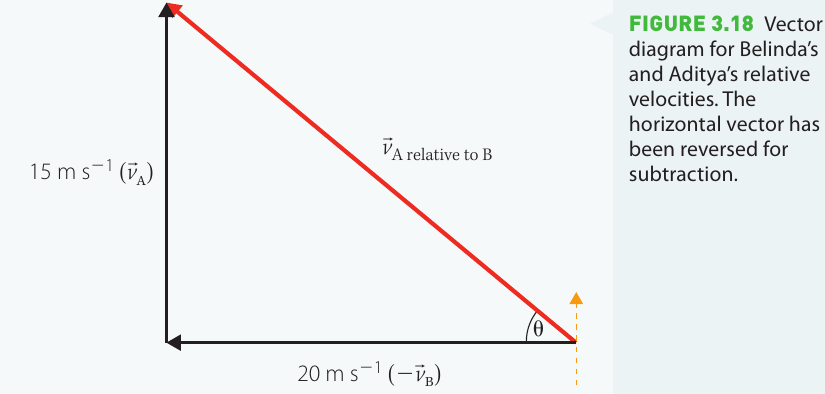
The diagram shows the vertical component (Aditya's velocity) and the horizontal component (negative of Belinda's velocity, reversed for subtraction). The red diagonal vector represents the resultant.
Step 4: Since the velocities are perpendicular, apply Pythagoras' theorem.
Step 5: Use trigonometry to find the direction.
Answer: at NW
This means that from Belinda's perspective, Aditya appears to be moving at in a direction west of north.
Exam tip: When working with perpendicular velocities, always draw a clear vector diagram. This helps you visualise the problem and check your angle calculations.
Worked example: boat crossing a river
Sometimes we need to work backwards: if we want a particular relative velocity, what components do we need? This is common when dealing with boats crossing rivers or aircraft flying in wind.
Worked Example: Boat Crossing River
Problem: A boat (B) is on a river. The river flows from south to north at (relative to the shore). What must the boat's velocity be relative to the water (W) if it is to go due west at relative to the shore?
Given information:
- west (relative to shore)
- north (relative to shore)
- We need to find
Step 1: Identify the vector equation.
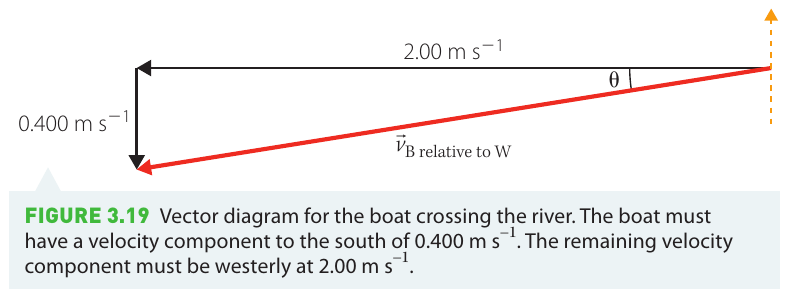
Step 2: Draw the vector diagram.
The boat must have a southward component to counteract the northward flow of the river, plus a westward component to move across.
Step 3: Subtract by adding the negative.
Step 4: Apply Pythagoras' theorem (velocities are perpendicular).
Step 5: Use trigonometry to find the angle.
Answer: at SW
This means the boat must aim at an angle of south of west to travel perpendicularly across the river (due west relative to the shore).
Practical Application: Aeroplanes in Crosswinds
For aeroplanes in crosswinds, the situation is similar to the boat example. However, in reality, the aeroplane won't be dragged sideways at exactly the same speed as the crosswind, but at some lesser velocity. The assumption that the air and plane have the same crosswise velocity is an approximation.
Non-perpendicular velocities
The examples above dealt with perpendicular velocities, which made calculations straightforward using Pythagoras' theorem. But what if the velocities are not perpendicular?
The vector equation still works when velocities are not perpendicular. However, we must resolve the vectors into components (typically north-south and east-west), perform the subtraction on each component separately, then recombine them to find the magnitude and direction of the result.
Component Resolution for Complex Velocities
When velocities are not perpendicular, remember: component-wise for complex - break into components for non-perpendicular velocities.
The process is:
- Resolve each velocity into components
- Subtract corresponding components
- Recombine using Pythagoras and trigonometry
Let's see how this works with a more complex example.
Worked example: aircraft with non-perpendicular velocities
This example brings together vector subtraction, component resolution, and the classic Red Baron scenario.
Worked Example: The Red Baron and Non-Perpendicular Velocities
Problem: The Red Baron (R) is flying at SW. He spots a Sopwith Camel (S) at the same height, flying at NE. What is the velocity of the Sopwith relative to the Red Baron's Fokker triplane?
Given information:
- SW
- NE
Step 1: Draw a labelled diagram showing the vectors and their components.
Note that when doing the subtraction, we reverse the Red Baron's velocity vector.
Step 2: Identify the vector equation.
Step 3: Write expressions for each component.
For the Sopwith:
For the Red Baron (noting the reversed direction):
- (becomes positive because of direction)
- (becomes negative because of direction)
Step 4: Write expressions for the components of the solution.
Step 5: Derive scalar component expressions.
Step 6: Substitute values and calculate.
Step 7: Apply Pythagoras' theorem to find the magnitude.
Step 8: Use trigonometry to find the angle.
Answer: NE
Relative to the Red Baron, the Sopwith is moving at in a direction east of north. Because the angles were measured from north, cosine was used to obtain the northerly components.
Exam tip: For non-perpendicular velocities, always:
- Draw a clear diagram with all angles marked
- Break each velocity into components
- Work with components separately
- Recombine using Pythagoras and trigonometry
- Check that your final answer makes physical sense
Remember!
Key Points to Remember:
-
Relative position depends on the observer's position. The displacement of object 1 relative to object 2 is .
-
Relative motion depends on the observer's motion. The velocity of object 1 relative to object 2 is .
-
A frame of reference is the viewpoint from which motion is observed. Different frames of reference see different velocities for the same object.
-
For perpendicular velocities, use Pythagoras' theorem to find the magnitude: , and use trigonometry to find the direction: (or vice versa depending on your coordinate system).
-
For non-perpendicular velocities, resolve into components first. Calculate the components of the relative velocity separately, then recombine using Pythagoras and trigonometry.