Stepper Motor (Leaving Cert Engineering): Revision Notes
Stepper Motor
What is a stepper motor?
A stepper motor is a specialised type of electromechanical device that transforms electrical signals into precise mechanical movement. Unlike regular motors that spin continuously, stepper motors move in exact, controlled steps when they receive electrical command signals.
The key feature of stepper motors is their ability to rotate in discrete step increments. When you send electrical pulses to the motor in the correct sequence, the motor shaft rotates by a specific angle with each pulse. This makes them incredibly useful for applications requiring precise positioning and control.
How stepper motors work
Stepper motors operate based on several important relationships between electrical inputs and mechanical outputs. Understanding these relationships is crucial for using stepper motors effectively.
Key Control Relationships in Stepper Motors
The stepper motor's operation depends on three fundamental relationships:
-
The sequence of electrical pulses determines the direction of shaft rotation. By changing the order in which you energise the motor windings, you can make the motor turn clockwise or anticlockwise.
-
The speed of rotation relates directly to the frequency of input pulses. Send pulses more quickly, and the motor spins faster. Send them slowly, and the motor moves at a slower speed.
-
The total rotation angle depends on the number of input pulses applied. Each pulse moves the motor by one step, so more pulses create more total movement.
Advantages of stepper motors
Stepper motors offer several significant benefits that make them popular in precision applications. These advantages make them ideal for applications requiring accurate positioning and reliable operation.
Key Benefits of Stepper Motors
-
Proportional rotation angle - The motor's rotation angle matches exactly with the number of input pulses, providing predictable movement
-
Full torque at standstill - When the windings are energised, the motor can hold its position with maximum force, even when not moving
-
Excellent positioning accuracy - Quality stepper motors achieve accuracy within 3-5% of each step, and importantly, this error doesn't accumulate from one step to the next
-
Outstanding response characteristics - Stepper motors excel at starting, stopping, and reversing quickly and precisely
-
High reliability - Since there are no contact brushes inside the motor, wear is minimal and motor life depends mainly on bearing quality
-
Open-loop control capability - The motor's response to digital pulses allows simple control systems without complex feedback mechanisms
-
Wide speed range - You can achieve many different rotational speeds by adjusting the frequency of input pulses
-
Direct coupling potential - Motors can be connected directly to mechanical loads without additional gearing in many applications
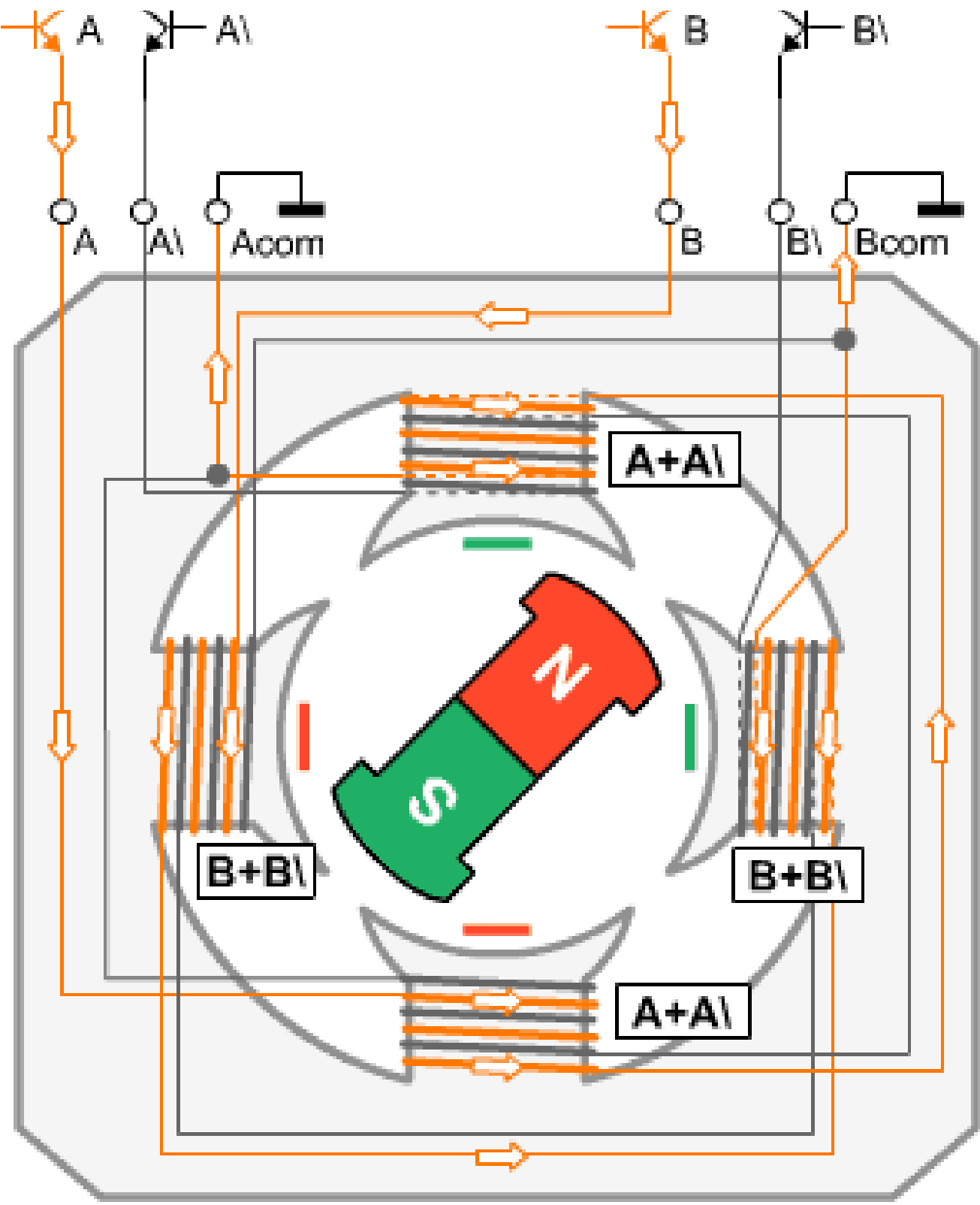
The technical diagram above shows the internal construction of a stepper motor. The central rotor contains permanent magnets with North (N) and South (S) poles. Four electromagnetic coils surround the rotor, creating magnetic fields when energised. The orange arrows indicate current flow paths through the windings, and the external connections (A, A1, B, B1) allow precise control of which coils are energised.
Disadvantages of stepper motors
Despite their many advantages, stepper motors have some limitations that must be considered in application design.
Limitations to Consider
-
Resonance problems - If not properly controlled, stepper motors can experience resonance effects that cause vibration, noise, and potential loss of steps
-
High-speed limitations - Stepper motors become difficult to operate effectively at very high rotational speeds, making them less suitable for high-speed applications
Physical construction and appearance
The photograph shows a typical stepper motor's external appearance. These motors feature a square housing with mounting holes in the corners, a precision metal output shaft, and multiple coloured connecting wires for electrical control. The robust construction makes them suitable for industrial applications including robotics, CNC machines, and 3D printers.
Key Points to Remember:
-
Stepper motors convert electrical pulses into precise mechanical steps - each pulse creates exactly one step of rotation
-
Three key relationships control stepper motor operation - pulse sequence controls direction, pulse frequency controls speed, and pulse count controls total rotation
-
Major advantages include precise positioning, full torque at standstill, and high reliability due to brushless construction
-
Main limitations are resonance issues and poor high-speed performance - they work best for precise, controlled movements rather than high-speed applications
-
Internal construction uses electromagnets around a permanent magnet rotor - energising different coil combinations creates the stepping action