Kinematics of Circular Motion 2 (AQA A-Level Further Maths): Revision Notes
Kinematics of Circular Motion 2
Introduction to circular motion
When a body moves in a circular path at constant speed, it experiences specific kinematic relationships. Although the speed remains constant, the velocity changes continuously because the direction changes. This means there is always an acceleration present, even when the speed is constant.
For a body moving on a circular path of radius with constant angular velocity about the centre, the following relationships hold:
Fundamental Equations for Circular Motion:
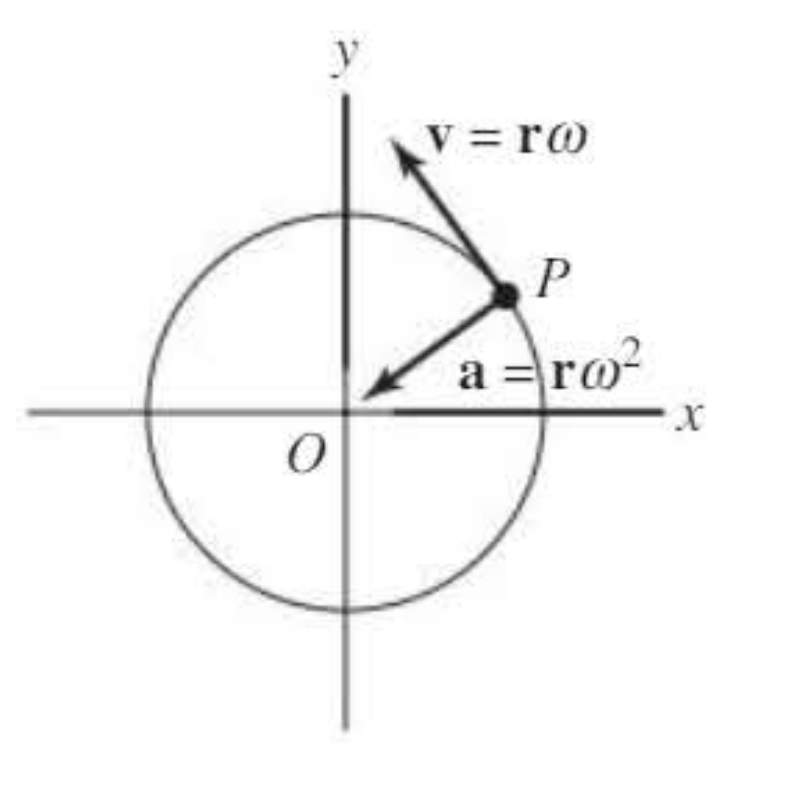
- The linear speed is constant and given by , directed along the tangent to the circle
- The acceleration has magnitude and is always directed towards the centre
- By Newton's 2nd law, there must be a centripetal force of magnitude directed towards the centre
- The time period for one complete revolution is
Understanding centripetal acceleration
The acceleration in circular motion does not change the speed of the object but continuously changes its direction. This is why we call it centripetal (centre-seeking) acceleration.
The negative sign in the vector form indicates that the acceleration is always in the opposite direction to the position vector, meaning it points towards the centre.
Vector method for circular motion
A more mathematically elegant way to derive these equations uses vectors and differentiation. This approach provides deeper insight into why these relationships exist.
Position vector
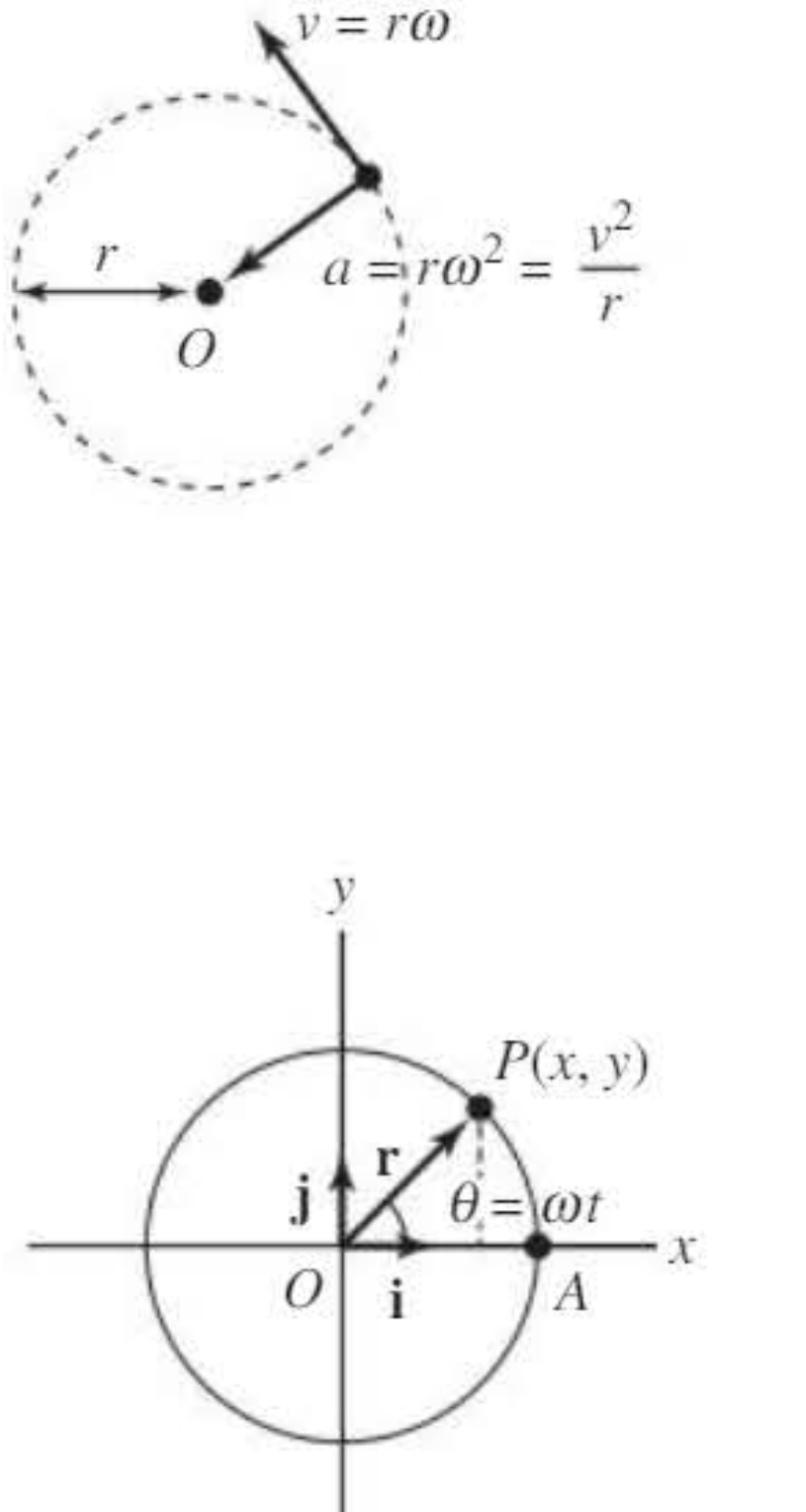
Consider a circle with radius and centre at the origin . If a point mass starts at point and after time seconds reaches point , then the angle swept out is , where is the constant angular velocity in rad s⁻¹.
The point has coordinates which can be written using trigonometry as .
Therefore, the position vector is:
where and are unit vectors parallel to the -axis and -axis respectively.
Velocity vector
To find the velocity, differentiate the position vector with respect to time .
Since is constant, we can use:
Differentiating the position vector:
This can be written as:
The magnitude of this velocity is:
This confirms the relationship v = rω.
Acceleration vector
Differentiate the velocity vector with respect to time to find the acceleration:
This can be factorised as:
The negative sign shows that is always directed towards the centre, in the opposite direction to .
The magnitude of the acceleration is:
This confirms the centripetal acceleration formula.
Centripetal force
Although there is no linear acceleration along the tangent, circular motion requires a linear acceleration towards the centre of the circle. This acceleration changes the direction of the particle rather than its speed.
By Newton's 2nd law, if there is an acceleration, there must be a force. For circular motion:
This force is directed towards the centre and is called the centripetal force. Its magnitude is:
Key Point about Centripetal Force:
The centripetal force is not a new type of force but rather the resultant force required to maintain circular motion. This force can be provided by tension, friction, gravity, or a combination of forces.
Worked example 1: Finding force on a point mass
Worked Example: Finding Force on a Point Mass
Question: A point mass of 5 kg has a position vector metres at a time seconds.
a) Find the magnitude in newtons of the force acting on the mass when seconds.
b) Show that the force and position vector are parallel at all times.
Solution:
Part a)
Given:
Step 1: Find the velocity by differentiating with respect to :
Step 2: Find the acceleration by differentiating the velocity:
Step 3: Apply Newton's 2nd law with mass kg:
Step 4: Evaluate at :
Step 5: Calculate the magnitude:
Part b)
From our work above:
We can write:
Since is a scalar multiple of , they are parallel but have opposite directions.
Worked example 2: Car on a banked curve
Worked Example: Car on a Banked Curve
Question: A car travels round a bend in a smooth road of radius 60 m which is banked at 10° to the horizontal.
a) Find the only safe speed (in km h⁻¹) at which the car can travel.
b) What assumption in this model is unrealistic?
Solution:
Part a)
Step 1: Draw a labelled diagram showing all forces.
Let the mass be , velocity be , and acceleration be .
Let the normal reaction from the ground on the car be .
The car does not move vertically, so forces must balance in the vertical direction.
Step 2: Resolve vertically (no vertical acceleration):
Step 3: Apply Newton's 2nd law horizontally (towards centre):
Step 4: Divide equation [2] by equation [1] to eliminate :
Step 5: Solve for :
This is the only safe speed. If m s⁻¹, the car skids up the slope. If m s⁻¹, the car skids down the slope.
Part b)
The model is unrealistic because it assumes no friction acting along the slope. In reality, a speed of 10.1 m s⁻¹ could not be maintained precisely, so friction would be needed to prevent sliding.
Worked example 3: Car on banked curve with friction
Worked Example: Car on Banked Curve with Friction
Question: The bend in Example 2 is resurfaced so the coefficient of friction is . Find the least value of for the car to round the bend at a speed of 26 m s⁻¹ without any side-slip up the slope.
Solution:
Step 1: Draw a diagram with forces.
At its greatest safe speed, the car is on the point of slipping up the slope, so friction acts down the slope with magnitude .
The centripetal acceleration is .
Step 2: Write equation of motion down the slope (parallel to slope):
In this direction, there is no acceleration, so forces balance:
where .
This gives:
Step 3: Simplify to find :
Step 4: Write equation perpendicular to slope:
The normal reaction must balance the component of weight and the component of acceleration:
Step 5: Use friction relationship :
At the limiting case, , so:
The least possible value of is 0.81.
Alternative method: This problem could also be solved by writing a horizontal equation of motion and resolving vertically for equilibrium, then solving the equations simultaneously.
Exam tips
For problems involving motion in a horizontal circle:
-
Draw and label a diagram showing all forces and other key variables (mass, velocity, acceleration, radius).
-
Use Newton's 2nd law to write an equation of motion towards the centre: or .
-
Write other equations involving forces as necessary (e.g., resolving vertically for equilibrium), and solve the system of equations.
-
Common exam traps:
- Forgetting that centripetal acceleration is always towards the centre
- Mixing up with
- Not recognising when to resolve forces parallel and perpendicular to slopes
- Forgetting friction acts in the opposite direction to potential motion
-
Problem-solving strategy:
- For banked curves, always resolve perpendicular to and parallel to the slope
- Eliminating the normal reaction by dividing equations often simplifies calculations
- Check units carefully, especially when converting between m s⁻¹ and km h⁻¹
Remember!
Key Points to Remember:
-
Constant speed ≠ constant velocity: In circular motion, the speed is constant but velocity continuously changes direction, causing acceleration towards the centre.
-
The centripetal acceleration formula: , always directed towards the centre of the circle.
-
The centripetal force formula: , representing the resultant force required to maintain circular motion.
-
Vector relationships: shows that acceleration is always opposite to the position vector (towards the centre).
-
For exam problems: Always draw a diagram, identify all forces, use Newton's 2nd law towards the centre, and resolve in appropriate directions for equilibrium conditions.