A Notation for Transformations (VCE SSCE Mathematical Methods): Revision Notes
A Notation for Transformations
Understanding transformation notation
Transformations of the plane can be thought of as functions that take a point and move it to a new location. Just as we use function notation for single-variable functions, we can use similar notation for transformations that work with two variables.
A transformation maps points from (the coordinate plane) to . We write this as:
where and
This notation tells us that takes a point and transforms it to a new point .
The maximal domain and range of transformations of this type is , meaning they work on all points in the coordinate plane. This is important because it tells us that these transformations can be applied to any point without restriction.
Basic transformations of the plane
Several fundamental transformations form the building blocks for more complex movements. These include reflections, dilations, and translations. Understanding these basic operations is essential for working with more complex transformations.
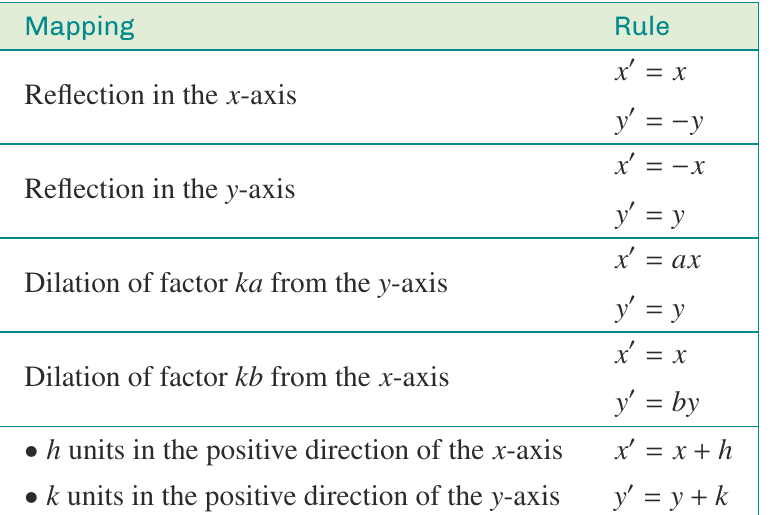
In the table above, the point represents the image of the original point after the transformation has been applied.
Understanding the General Form
All of these basic transformations, and combinations of them, can be expressed in the general form:
where and
This powerful representation allows us to describe any combination of reflections, dilations, and translations using just four parameters: , , , and .
Linear transformations
Linear transformations are a special category of transformations. They include dilations, reflections in the -axis, reflections in the -axis, and combinations of these operations.
A transformation is defined as linear when it has the form:
Notice that linear transformations don't include constant terms in their expressions. This is an important distinction.
Critical Distinction for Linear Transformations
Transformations of the form are only linear when .
If either or is non-zero, the transformation includes a translation component and is therefore not linear.
Reflection in the line
Another example of a linear transformation is reflection in the line . This transformation swaps the and coordinates.

Connection to Inverse Functions
This transformation is particularly important because it relates to inverse functions. When you reflect the graph of in the line , you obtain the graph of the inverse function .
This geometric relationship provides a visual way to understand why inverse functions "swap" the roles of and .
Worked example: Evaluating transformations
Worked Example: Evaluating a Transformation
Let ,
Part a: Evaluate and
Solution:
For :
For :
Notice that the point is mapped to itself under this transformation - it's a fixed point!
Part b: Find the equation of the image of the graph , where , under this transformation.
Solution:
We have and let
From the transformation:
Solving for :
Solving for :
Since the original graph is , we substitute:
Simplifying to standard form (dropping the primes):
Worked example: Finding transformation parameters
Worked Example: Determining Unknown Parameters
Let , . Given that and , determine the values of , , and .
Solution:
From :
From :
Subtracting equation (3) from equation (1):
Substituting into equation (1):
Subtracting equation (4) from equation (2):
Substituting into equation (2):
Therefore: a = -6, b = -5, h = -1, k = 27
Composition of transformations
Composition of transformations combines multiple transformations in sequence. This works similarly to function composition, where we apply one transformation and then apply another to the result.
The composition of transformations and can be written as , which means "apply first, then apply ".
Worked Example: Composing Transformations
Let and . Find the rule for:
Part a:
Solution:
Part b:
Solution:
Notice that T₂(T₁(x, y)) ≠ T₁(T₂(x, y)), demonstrating that composition is not commutative in this case.
Important properties of composition
Several key properties apply to composition of transformations:
Key Properties of Composition
-
Two transformations and are equal if for all
-
The composition can be written using circle notation:
-
In general, composition is not commutative. That is, , or
-
Some families of transformations do commute. For example, if and are both translations, then
Inverses of transformations
An inverse transformation "undoes" the effect of the original transformation, returning points to their original positions.
A transformation is one-to-one if implies and . All transformations of the form we're studying are one-to-one.
For a transformation , we define its inverse by:
The inverse transformation is also one-to-one, and is the inverse of .
Key properties of inverse transformations:
Worked Example: Finding an Inverse Transformation
Find the inverse of the transformation ,
Solution:
We know that
Let
Then:
From this, we get two equations:
Solving for :
Solving for :
Therefore:
You can verify this is correct by checking that . This verification step confirms that the inverse truly "undoes" the original transformation.
Transformations on subsets of
When working with functions that have restricted domains (not all of ), we need to consider how transformations affect both the domain and range.
Worked Example: Transformations with Restricted Domains
Consider the function , .
Part a: Find the range of
Solution:
The graph of has a local maximum at .
The endpoints have coordinates and .
Therefore the range is -3, 1
Part b: Find the image of under the transformation with rule . State the domain and range of this image.
Solution:
Let
Therefore, and
Solving for and :
The original equation becomes:
Simplifying (and dropping the primes):
The domain is calculated from the original domain :
The turning point, which is now a local minimum, has coordinates:
The range can be calculated from the domain and equation of the image as 1, 9.
Alternative Method for Finding Range
Alternatively, you can consider the transformation of the original range . Note that there is a reflection in the x-axis (the coefficient of is negative), so care must be taken with the endpoints of the range when using this method.
Key Points to Remember:
-
Transformations are written as , where and
-
Linear transformations have the form with no constant terms
-
To find the image of a function under a transformation, express and in terms of and , then substitute into the original equation
-
Composition of transformations is generally not commutative: in most cases
-
The inverse transformation satisfies