Damped and Forced Harmonic Motion (AQA A-Level Further Maths): Revision Notes
Damped and Forced Harmonic Motion
Introduction
When a particle attached to an elastic string or spring is set in motion, the amplitude of oscillations often decreases over time in real-world situations. This occurs due to external forces such as friction and air resistance, which cause the system to lose energy gradually. In some cases with strong resistance, oscillations may not occur at all. This behaviour is called damped harmonic motion.
Additionally, when one end of the spring or string is moved (rather than being fixed), the motion is called forced harmonic motion, where the particle oscillates about a moving equilibrium position.
In reality, all oscillating systems experience some form of damping. Perfect simple harmonic motion with constant amplitude only exists in idealized conditions. Understanding damped and forced motion is essential for modeling real-world systems like car suspensions, building structures during earthquakes, and electrical circuits.
Simple harmonic motion review
Simple harmonic motion (SHM) occurs when a particle moves under a restoring force proportional to its displacement from a fixed point, with no other forces acting on it.
The standard differential equation for SHM is:
or equivalently:
where is the angular frequency of oscillation.
Damped harmonic motion
Definition
Damped harmonic motion occurs when a particle moving in simple harmonic motion is subject to a resistive force that is proportional to the velocity of the particle. This resistive force opposes the motion and causes the amplitude of oscillations to decrease over time.
Physical interpretation
Analogy: Particle in Treacle
A useful analogy is to imagine a particle and spring placed in a tub of treacle:
- If the treacle is thin, the particle oscillates much as before, with amplitude slowly decreasing
- If the treacle is thick, there might be no oscillations at all, and the particle moves slowly towards an equilibrium position
This helps visualize how the strength of damping affects the motion's behaviour.
Differential equation model
The differential equation for damped harmonic motion has the form:
where:
- is the damping coefficient (larger means stronger resistance to motion)
- is related to the stiffness of the spring
- The ratio determines whether the particle oscillates
The damping effect is caused by the term , which represents the resistive force proportional to velocity.
Auxiliary equation and solution types
To solve damped harmonic motion problems, we use the auxiliary equation:
Critical Concept: The Discriminant Determines Damping Type
The discriminant of the auxiliary equation determines the type of damping:
- Positive discriminant () → Heavy damping (no oscillation)
- Zero discriminant () → Critical damping (fastest approach without oscillation)
- Negative discriminant () → Light damping (oscillation with decreasing amplitude)
Remember: Complex roots oscillate, real roots decay!
Heavy damping
Condition: (discriminant is positive)
Solution form:
where and are real, distinct, negative roots.
Behaviour: The particle approaches equilibrium without oscillating. This occurs when damping is very strong.
Critical damping
Condition: (discriminant is zero)
Solution form:
where is a repeated real root.
Behaviour: The particle approaches equilibrium as quickly as possible without oscillating. This is the boundary case between heavy and light damping.
Light damping
Condition: (discriminant is negative)
Solution form:
where
Behaviour: The particle oscillates with decreasing amplitude, gradually approaching the equilibrium position. The exponential term causes the amplitude to decay.
Forced harmonic motion
Forced harmonic motion occurs when one end of the spring or string is not fixed but moves in a prescribed way. The particle still experiences a restoring force, but the equilibrium position itself changes over time.
Solution approach
For forced harmonic motion, the differential equation typically includes a time-dependent term on the right-hand side. The general solution consists of:
- Complementary function (CF): Solution to the homogeneous equation (obtained using the auxiliary equation)
- Particular integral (PI): A specific solution that satisfies the full differential equation
The general solution is: CF + PI
The motion often involves oscillations about a moving equilibrium line rather than a fixed point. This is fundamentally different from damped motion, where the equilibrium position remains fixed. In forced motion, you're essentially "chasing" a moving target, which creates the characteristic behaviour seen in applications like vehicle suspensions on uneven roads.
Problem-solving strategy
Five-Step Strategy for Damped or Forced Harmonic Motion
- Draw a force diagram showing all forces acting on the particle
- Use Newton's 2nd law to form a second-order differential equation ()
- Find the general solution to that differential equation using the auxiliary equation method
- Use the information given in the question to find the particular solution (apply initial conditions)
- Answer the question in context (e.g., sketch graph, find time, classify damping type)
Always remember: Resistive forces oppose motion and act in the direction opposite to velocity!
Worked examples
Worked Example 1: Damped Harmonic Motion with Complex Roots
Problem: A particle moves along a horizontal line under the action of a force directed towards a fixed point . The displacement metres of from its initial position, at time seconds from the start, satisfies the differential equation:
At time , the particle is moving through the point with velocity .
a) Solve the differential equation to obtain an expression for in terms of
b) Sketch the graph of against
Solution:
a) First, find the auxiliary equation:
Using the quadratic formula:
This gives complex roots, indicating the complementary function has the form:
For the particular integral, try (constant):
So the particular integral is .
The general solution is:
Now apply initial conditions. At , :
The solution is now:
Differentiate to find velocity:
At , :
Therefore, the particular solution is:
b) The graph oscillates about the line with decreasing amplitude due to the damping term .
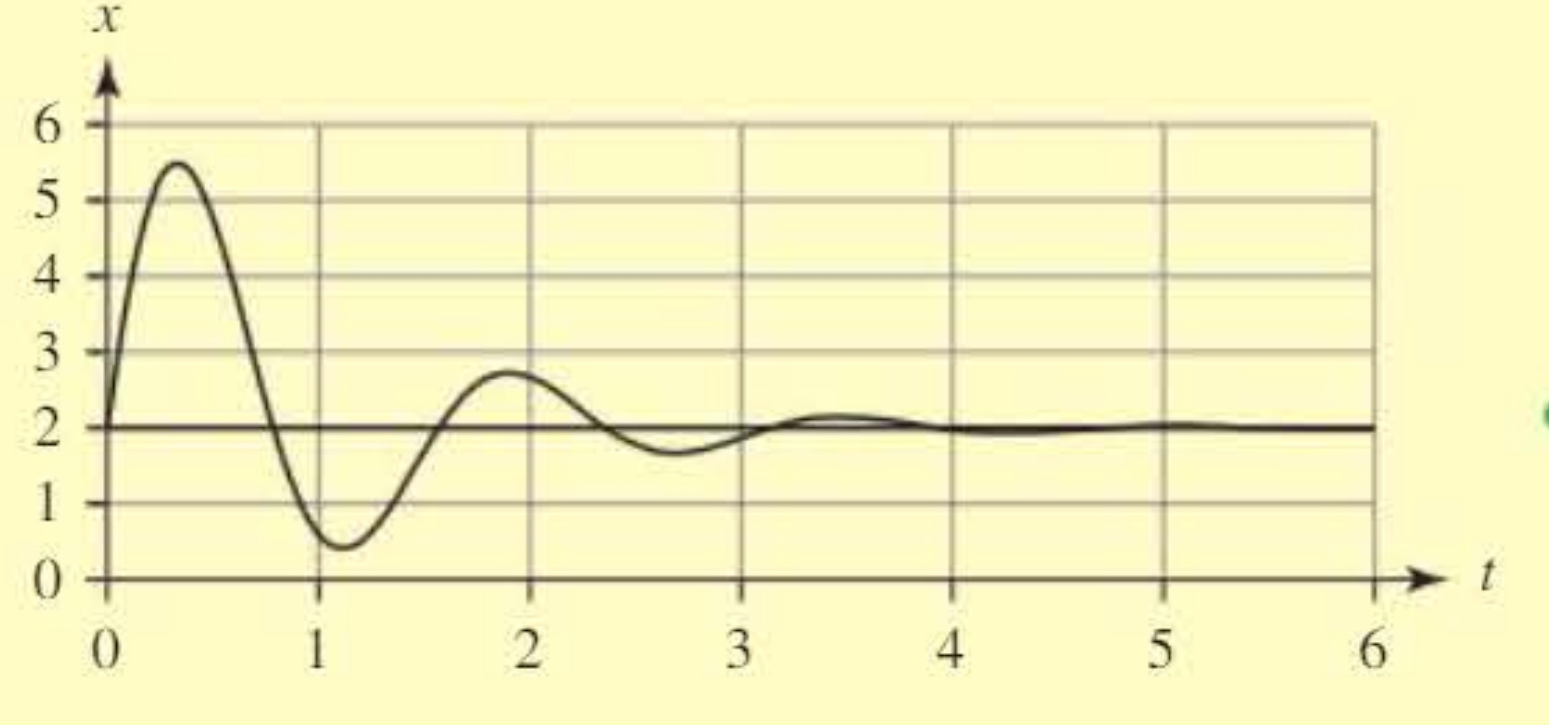
Key observation: This is called damped harmonic motion. The graph oscillates about . The damping effect is caused by the term .
Worked Example 2: Heavy Damping
Problem: A particle moves along a horizontal line under the action of a force directed towards a fixed point . The displacement metres of the particle from its initial position, at time seconds from the start, satisfies the differential equation:
At time , the particle is moving through the point with velocity .
a) Solve the differential equation to obtain an expression for in terms of
b) Find the time at which the particle is at rest
c) Sketch the graph of against
d) Explain whether the type of damping is light, critical or heavy
Solution:
a) The auxiliary equation is:
Factorising:
This gives real distinct roots, so the complementary function is:
For the particular integral, try :
The general solution is:
Differentiate:
Apply initial conditions. At , :
At , :
Solving simultaneously:
The particular solution is:
b) Set velocity equal to zero:
c) The graph shows the particle approaching equilibrium at without oscillating.
d) The discriminant is:
Hence the damping is heavy.
Worked Example 3: Forced Harmonic Motion
Problem: A box is attached to one end of a light elastic string. The box is initially at rest on a smooth horizontal table when the other end of the spring, , starts to move away from with constant velocity . The displacement metres of from its initial position at time seconds from the start satisfies the differential equation:
a) Find an expression for in terms of
b) Calculate the time at which is next at rest
c) Sketch the graph of against
Solution:
a) The auxiliary equation is:
This gives complex roots, so the complementary function is:
For the particular integral, try :
Substituting:
Comparing coefficients:
So the particular integral is .
The general solution is:
At , (box initially at rest at starting position):
The solution is now:
Differentiate:
At , (box initially at rest):
The particular solution is:
b) Set velocity to zero:
c) The graph oscillates about the line .
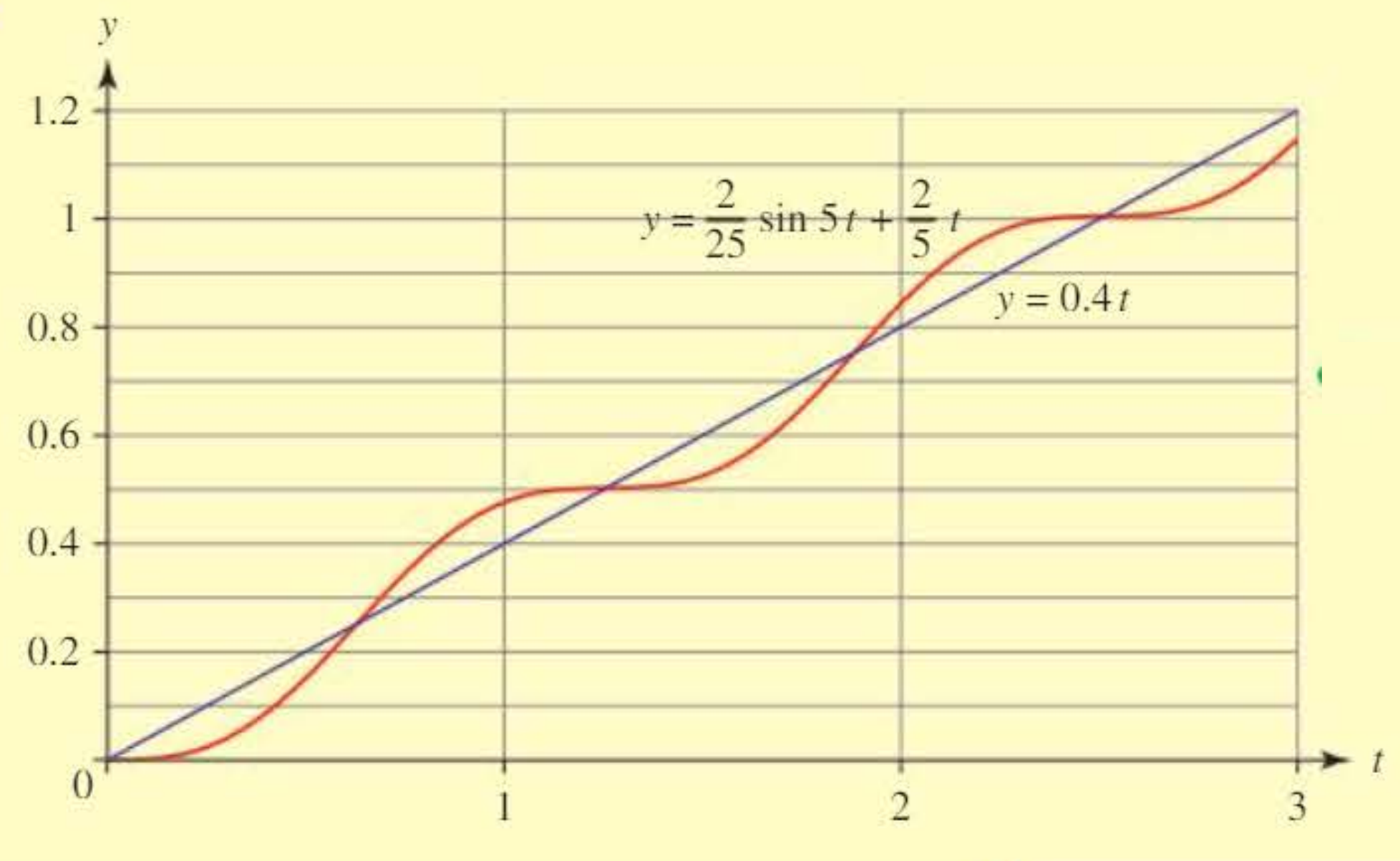
Key observation: In forced harmonic motion, the equilibrium position changes over time. Here, the box oscillates around the line rather than a fixed point.
Worked Example 4: Using Newton's Second Law
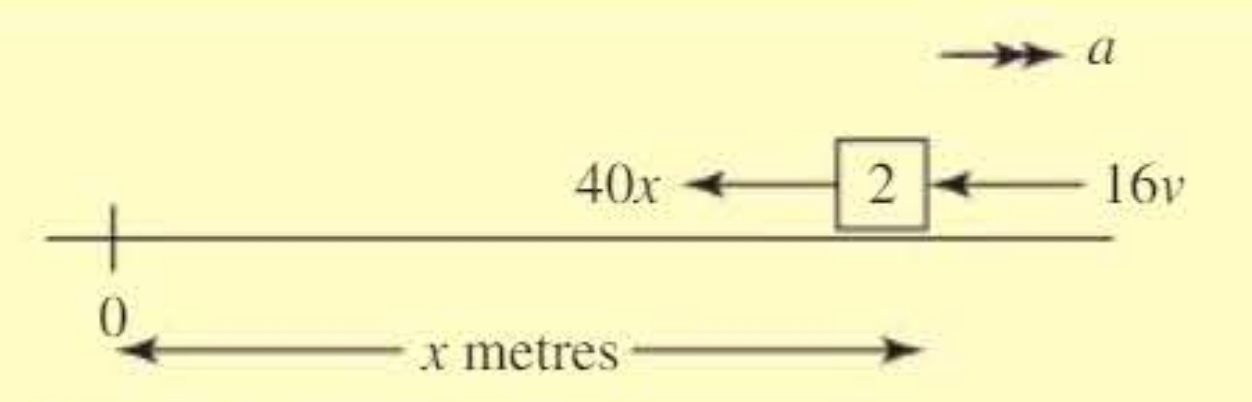
Problem: A particle of mass kg moves along the positive -axis under the action of a force directed towards the origin. At time seconds, the displacement of from is metres, and is moving away from with speed . The force has magnitude N. The particle is also subject to a resistive force of magnitude N.
a) Show that the equation of motion of is:
Given also that and
b) Solve the differential equation and find an expression for in terms of
Solution:
a) Draw a force diagram:
Using :
Since and :
Dividing by :
b) The auxiliary equation is:
Using the quadratic formula:
The general solution is:
At , :
When , :
After applying this condition, the particular solution is:
Exam tip: Always draw a force diagram and clearly identify all forces acting on the particle. Remember that resistive forces oppose motion, so they act in the opposite direction to velocity.
Worked Example 5: Train with Elastic Buffers
Problem: A train of mass kg runs into buffers that can be modelled as an elastic spring fixed at one end. At time seconds after first contact, the compression is metres, and the force in the spring is newtons (where is a positive constant). The motion is also subject to a resistive force of magnitude newtons (where is the speed and is a positive constant).
a) Show that:
b) At time , the train is travelling with speed . Given that , find an expression for in terms of , and
c) Show that the train comes to instantaneous rest when
d) State three assumptions made in forming your model
Solution:
a) Using :
Dividing by :
b) Substitute into the auxiliary equation:
The general solution is:
At , (just making contact):
Differentiating:
At , :
Solving for and :
The particular solution is:
c) Set velocity to zero:
d) Assumptions made:
- The engine is disengaged
- The brakes are not applied
- The spring has no mass
Exam tip: When modelling physical systems, always state your assumptions clearly. Common assumptions include negligible mass of springs, no air resistance, smooth surfaces, and that the spring obeys Hooke's law throughout.
Key Points to Remember
-
Damped harmonic motion occurs when a resistive force proportional to velocity acts on a particle in SHM, causing amplitude to decrease over time.
-
The auxiliary equation determines the type of damping based on its discriminant: heavy (positive discriminant, no oscillation), critical (zero discriminant, fastest approach to equilibrium), or light (negative discriminant, oscillation with decreasing amplitude).
-
Forced harmonic motion occurs when one end of the system moves, causing oscillations about a changing equilibrium position rather than a fixed point.
-
Always use Newton's second law () to set up the differential equation, carefully identifying all forces including restoring forces and resistive forces.
-
The general solution consists of the complementary function (from the auxiliary equation) plus the particular integral. Use initial conditions to find the specific solution for the problem.