Determinants, Inverse Matrices, and Linear Equations (AQA A-Level Further Maths): Revision Notes
Determinants, Inverse Matrices, and Linear Equations
Introduction
This note covers three interconnected concepts in matrix algebra. Understanding determinants allows us to find inverse matrices, which in turn enables us to solve systems of linear equations. These techniques are fundamental for A-Level Further Mathematics and have applications in transformations, geometry, and problem-solving.
These three concepts form a unified framework: determinants tell us whether inverses exist, and inverses provide the key to solving linear systems. Mastering the connections between them is essential for success in Further Mathematics.
Determinants
What is a determinant?
A determinant is a scalar value that can be calculated from any square matrix. The determinant provides important information about the matrix, including whether it has an inverse and how it affects geometric transformations.
Determinant of a 2×2 matrix
For a 2×2 matrix , the determinant is calculated using:
This formula is straightforward: multiply the diagonal elements (top-left to bottom-right) and subtract the product of the off-diagonal elements (top-right to bottom-left).
Exam tip: You can use your calculator to find 2×2 determinants, but you must know the formula for exam questions that require working.
Determinant of a 3×3 matrix
Finding the determinant of a 3×3 matrix requires a more sophisticated approach involving minors.
Understanding minors
What is a minor?
The minor of an element in a matrix is the determinant you obtain when you remove (cross out) the row and column containing that element, then calculate the determinant of the remaining 2×2 matrix.
For example, consider the matrix
To find the minor of element , cross out the first row and first column:
The remaining matrix is , so the minor of is
Formula for 3×3 determinants
To calculate the determinant of a 3×3 matrix, use the elements from the top row and their corresponding minors:
For matrix :
Note the alternating signs: positive, negative, positive. This pattern is crucial for correct calculation.
Expanding this fully:
Exam tip: Always use the top row elements and follow the plus-minus-plus sign pattern. Take extra care with negative numbers to avoid sign errors.
Worked Example: Calculating a 3×3 Determinant
Question: Find the determinant of the matrix
Solution:
Using the formula with the top row elements (3, 2, -1):
Calculate each 2×2 determinant:
- First minor:
- Second minor:
- Third minor:
Substituting back:
Key insight: When dealing with negative numbers, write each step clearly to avoid sign errors. Always check your arithmetic carefully.
Geometric interpretation of determinants
Determinants have important geometric meanings related to how matrices transform shapes.
Area transformations using 2×2 matrices
When a 2×2 transformation matrix is applied to a shape, the area changes according to:
The absolute value of the determinant gives the scale factor by which areas are multiplied. This is a fundamental property of linear transformations.
Key point about determinant signs:
- If , the transformation involves a reflection
- If , the orientation is preserved
The sign tells us about the nature of the transformation, while the magnitude tells us about the scaling effect.
Worked Example: Area Calculation Under Transformation
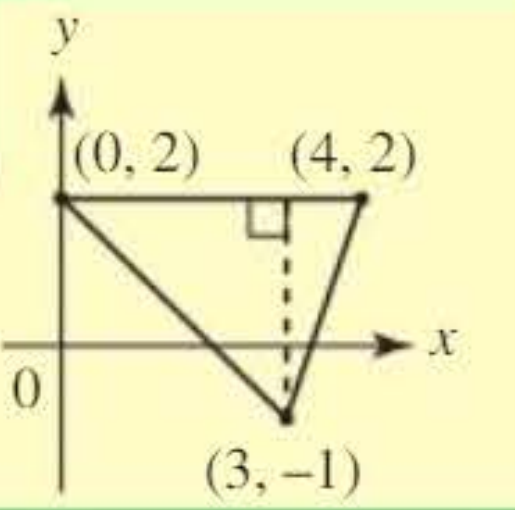
Question: A triangle has vertices at , , and . It is stretched by scale factor 2 parallel to the -axis and by scale factor -3 parallel to the -axis. Find the area of the image.
Solution:
The transformation matrix is
First, calculate the determinant:
The original triangle has area:
Using the formula:
Key insight: The negative determinant tells us the shape has been reflected. Always sketch the transformation when finding areas to help visualise the problem.
Volume transformations using 3×3 matrices
The same principle extends to three dimensions. For a 3×3 transformation matrix :
Worked Example: Volume Calculation Under Transformation
Question: A cube is transformed by the matrix to create a parallelepiped (a prism where each face is a parallelogram). The volume of the parallelepiped is 36 cm³.
a) Calculate the volume of the original cube.
b) Explain whether the transformation involves a reflection.
Solution:
a) First, find :
Using the volume formula:
b) Since , the transformation does not involve a reflection.
Key insight: When finding volumes, remember to divide by the absolute value of the determinant to work backwards from image to original.
Inverse matrices
What is an inverse matrix?
The inverse of a matrix , denoted , is a matrix that satisfies:
where is the identity matrix (a matrix with 1s on the main diagonal and 0s elsewhere).
When does an inverse exist?
Only non-singular matrices have inverses. A non-singular matrix has a non-zero determinant.
A singular matrix has and does not have an inverse.
Critical step: Always check the determinant first when asked to find an inverse. If it's zero, state that the matrix is singular and has no inverse. This is a common mistake in exams - attempting to find an inverse when none exists.
Finding the inverse of a 2×2 matrix
For a 2×2 matrix , the inverse is:
Memory aid: The process is: swap the diagonal elements, change the signs of the off-diagonal elements, then divide by the determinant.
Finding the inverse of a 3×3 matrix
Finding the inverse of a 3×3 matrix requires several steps using the matrix of minors method.
Step 1: Create the matrix of minors
Replace each element in the original matrix with its minor (the determinant of the 2×2 matrix remaining after crossing out that element's row and column).
For matrix , the matrix of minors is:
where:
- is the minor of :
- is the minor of , and so on for all nine elements
Step 2: Apply the sign matrix
Change the signs of alternating elements using the sign matrix:
This creates the matrix of cofactors. The pattern resembles a checkerboard starting with + in the top-left corner.
Step 3: Transpose and divide by the determinant
Transpose the matrix (swap rows and columns), then multiply by :
Worked Example: Finding a 3×3 Inverse
Question: Find the inverse of , given that it is non-singular.
Solution:
Step 1: Find the matrix of minors by calculating the minor of each element:
For element in position (1,1):
For element in position (1,2):
For element in position (1,3):
Continuing for all elements:
Step 2: Calculate the determinant of using the top row minors:
Step 3: Apply the sign matrix, transpose, and divide by the determinant:
After applying signs and transposing:
Key insight: This method can be lengthy, so calculators are often permitted for finding 3×3 inverses in exams. However, you must understand the method and be able to demonstrate the steps when required.
Solving systems of linear equations using matrices
Matrix representation of linear systems
A system of linear equations can be written in matrix form. For example, the system:
can be written as:
Or more concisely as , where is the coefficient matrix, is the variable vector, and is the constant vector.
Strategy for solving linear systems
Strategy 1: Using Inverse Matrices
-
Rewrite the system of linear equations using matrices in the form
-
Pre-multiply or post-multiply both sides of the equation by the inverse of
-
Use the identity property to simplify
Since , we get , which simplifies to
Conditions for a unique solution
Critical condition: A system of linear equations represented by has a unique solution if and only if .
When , the matrix is singular and has no inverse. In this case, the system either has no solution (inconsistent) or infinitely many solutions.
Worked Example: Solving a System with Unique Solution
Question: Given that there is a unique solution, use matrices to solve:
Solution:
Write in matrix form:
Calculate the determinant:
Since , a unique solution exists.
Find the inverse (calculation details omitted for brevity):
Pre-multiply both sides by :
Therefore: , ,
Geometric interpretation: Intersection of planes
A linear equation in three variables, such as , represents a plane in three-dimensional space. When we have three such equations, we are looking for points where all three planes intersect.
There are three possibilities:
1. No intersection (inconsistent system)
This occurs when:
- Two or three planes are parallel to each other
- The three planes form a triangular prism (no common point)
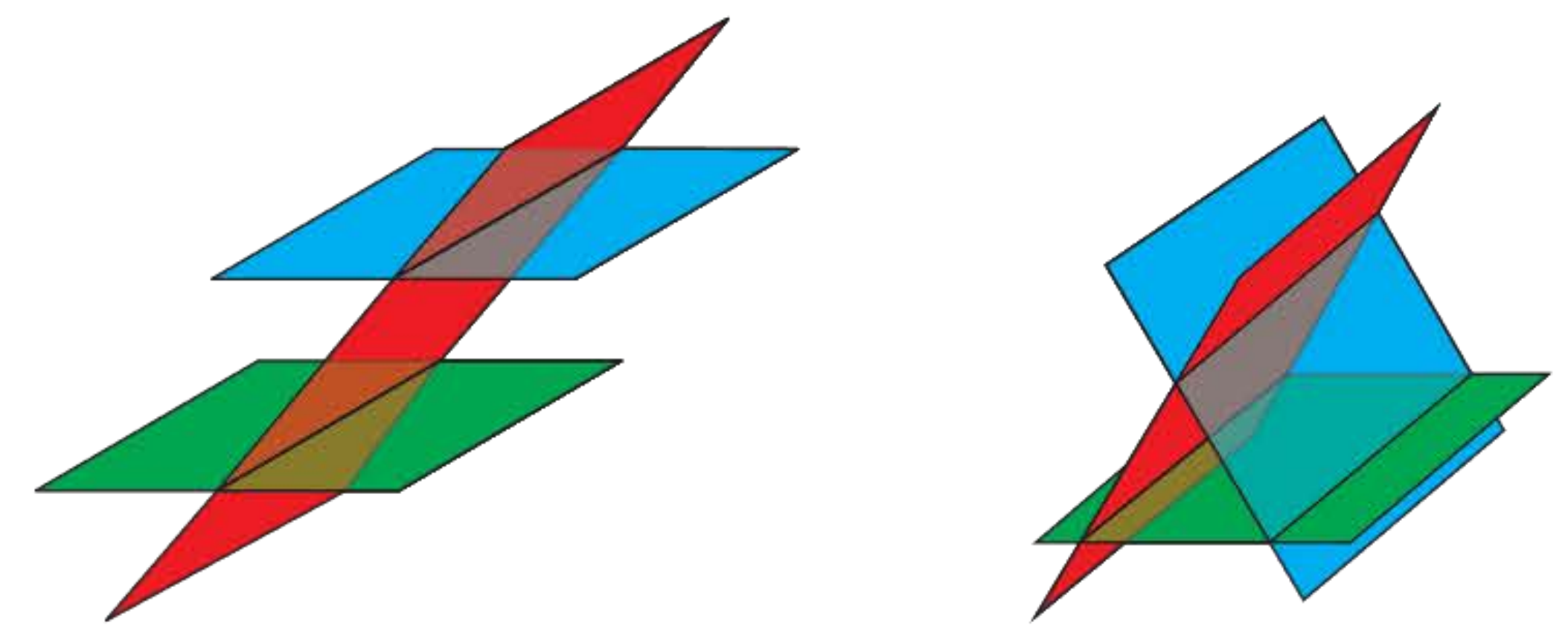
2. Infinite solutions (sheaf)
The three planes meet along a line. Every point on this line is a solution to the system.
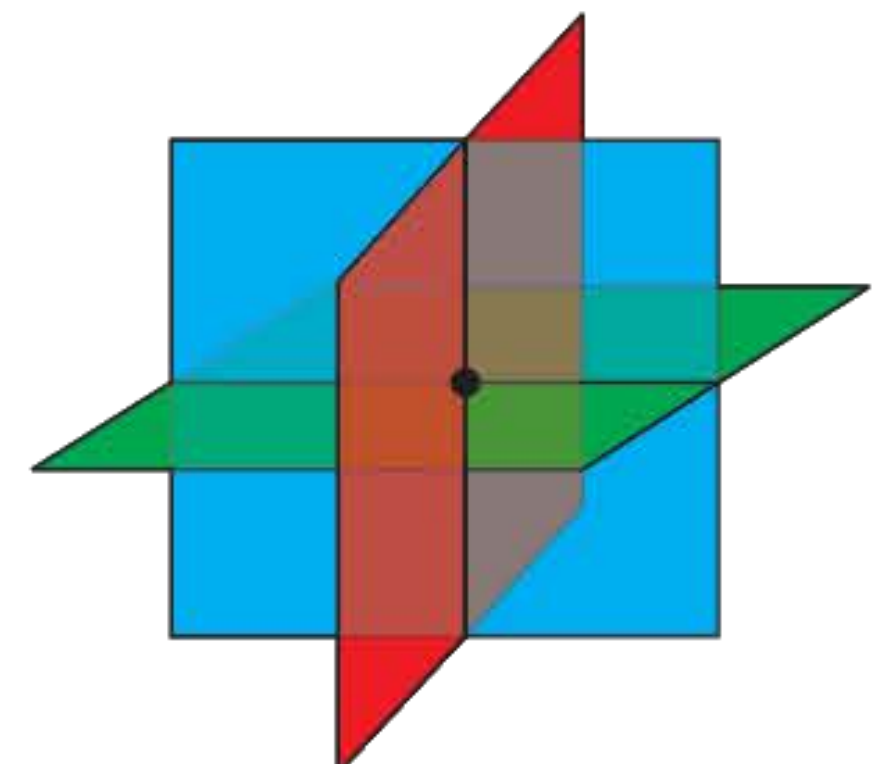
3. Unique solution
The three planes intersect at exactly one point.
Worked Example: System with No Solutions
Question: Explain why these systems have no solutions.
a) , ,
b) , ,
Solution:
a) Notice that is a multiple of except for the constant term. Specifically, if we multiply the first equation by 2, we get , not 1. This means these represent parallel planes that never intersect. Therefore, there are no solutions.
b) Adding the first and third equations together:
However, the second equation states that . This is a contradiction (), so the equations are inconsistent and the planes form a triangular prism with no common intersection point.
Key insight: Always check for parallel planes by looking for equations that are multiples of each other (with different constants). Check for inconsistencies by trying to eliminate variables.
Worked Example: System with Infinite Solutions
Question: A system of equations is given: , ,
a) Decide whether there is a unique solution, infinite solutions, or no solutions.
b) Describe the geometric significance.
Solution:
a) Write in matrix form and calculate the determinant:
Since the determinant is zero, there is either no solution or infinitely many solutions.
To determine which, we need to check for inconsistencies. From the second equation:
Subtracting the third equation from the first:
Verify by substituting into the original equations - there are no inconsistencies, confirming infinite solutions. The solutions lie on the line with equations and .
b) The planes meet in a line, forming a sheaf.
Key insight: When the determinant is zero, always check whether the system is inconsistent (no solutions) or has infinite solutions by attempting to solve and looking for contradictions.
Key Points to Remember:
-
The determinant of a 2×2 matrix is ; for 3×3 matrices, use minors with a plus-minus-plus sign pattern across the top row
-
The absolute value of a determinant gives the scale factor for area (2×2) or volume (3×3) transformations; a negative determinant indicates a reflection
-
Only non-singular matrices (with non-zero determinant) have inverses; singular matrices with zero determinant cannot be inverted
-
For 2×2 inverses: swap diagonal elements, change signs of off-diagonals, divide by determinant; for 3×3: use matrix of minors, apply sign pattern, transpose, then divide by determinant
-
A system of linear equations has a unique solution if and only if the coefficient matrix has a non-zero determinant; zero determinant means either no solution or infinitely many solutions